


編輯的備註:這篇文章是《進入全宇宙》系列的一部分,專注於開發者、3D從業者和企業如何利用最新的OpenUSD和NVIDIA Omniverse技術來改變他們的工作流程。
人形機器人正迅速成為現實。基於NVIDIA Isaac GR00T的機器人已經開始學習走路、操作物體,並與現實世界互動。
收集多樣且龐大的數據集來訓練這些複雜的機器可能既耗時又昂貴。透過使用合成數據(SDG),這些數據是從物理準確的數位雙胞胎生成的,研究人員和開發者可以在模擬環境中訓練和驗證他們的AI模型,然後再部署到現實世界中。
通用場景描述(Universal Scene Description),簡稱OpenUSD,是一個強大的框架,使得建立這些物理準確的虛擬環境變得簡單。一旦3D環境建立完成,OpenUSD允許團隊開發詳細且可擴展的模擬,並創建機器人可以練習、學習和提升技能的真實場景。
這些合成數據對於人形機器人學習像人類一樣的行為,如走路、抓取物體和在複雜環境中導航是非常重要的。OpenUSD正在促進人形機器人的發展,為未來這些機器能夠無縫融入人們日常生活鋪平道路。
NVIDIA Omniverse平台,基於OpenUSD,為開發者提供了一種統一來自不同來源的3D資產的方法,例如3DCAD和數位內容創作(DCC)工具。這使他們能夠建立大型3D虛擬環境並運行複雜的模擬來訓練他們的機器人,簡化整個過程,並提供更快、更具成本效益的協作和開發物理AI的方法。
利用合成運動數據提升機器人訓練
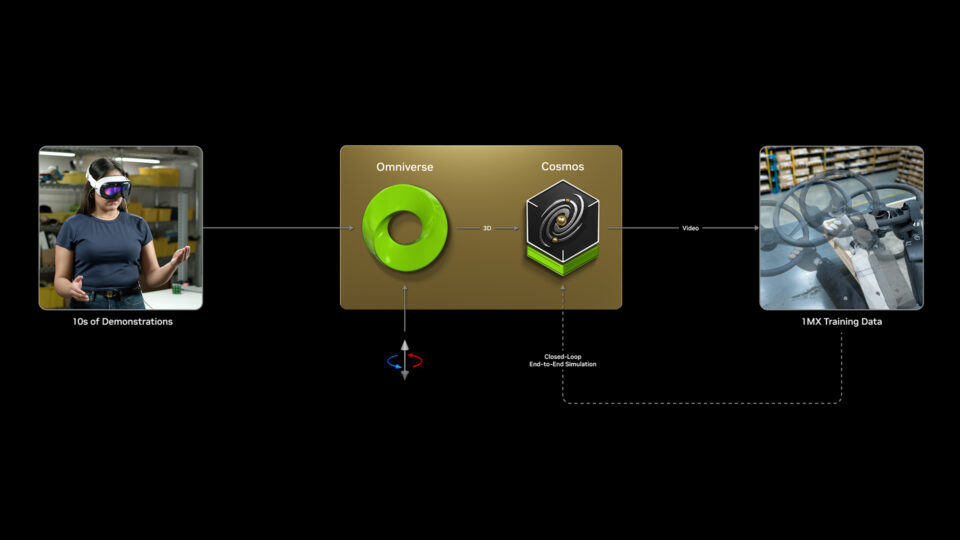
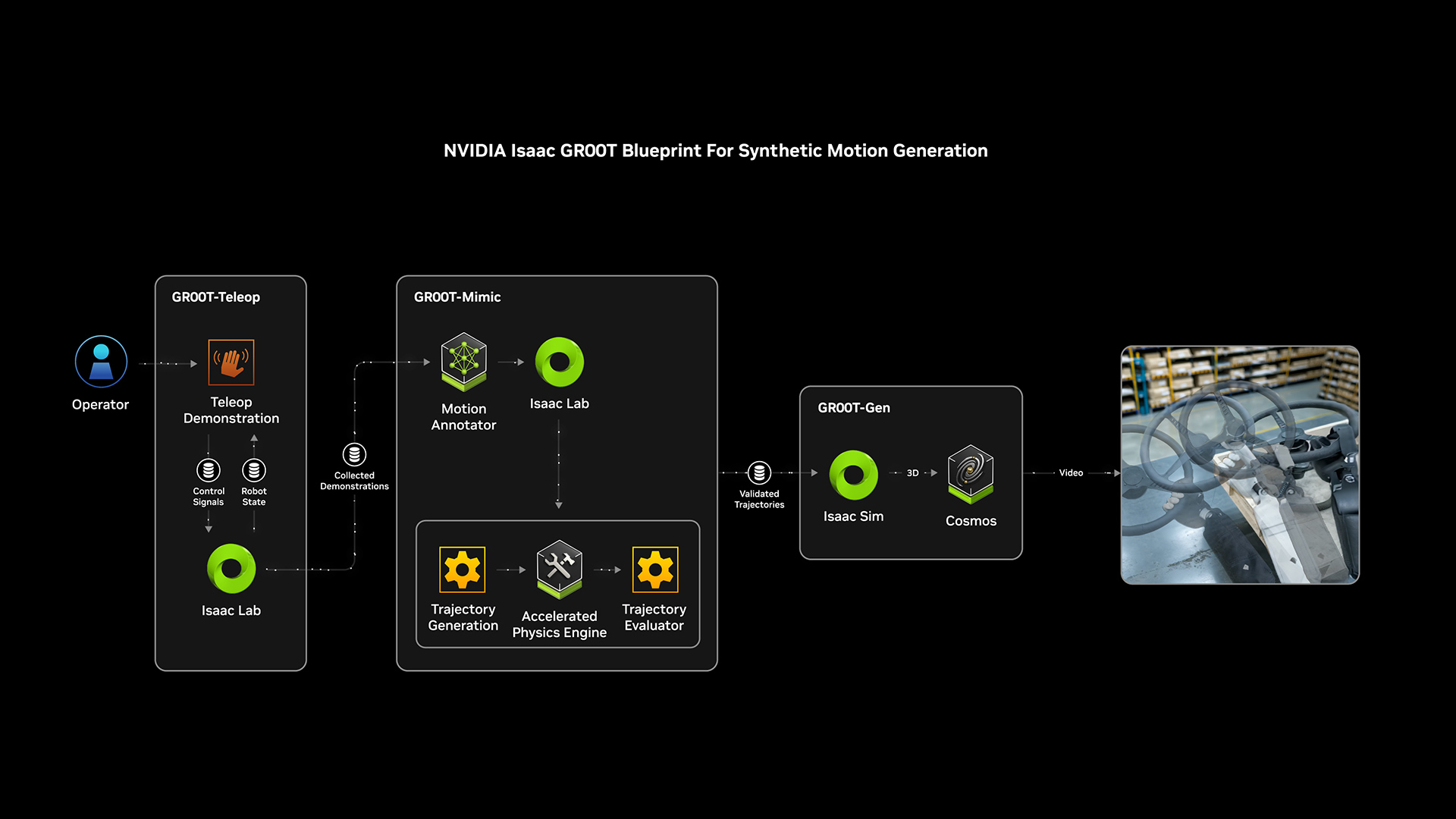
在上個月的CES展上,NVIDIA宣布了Isaac GR00T藍圖,用於合成運動生成,幫助開發者生成更大規模的合成運動數據集,以使用模仿學習來訓練人形機器人。
這次發布的亮點包括:
大型運動數據生成:使用模擬和生成AI技術來生成大量多樣的人類運動數據,加速數據收集過程。
更快的數據增強:NVIDIA Cosmos世界基礎模型利用Omniverse的真實模擬生成照片真實的視頻,這使開發者能夠更快地增強合成數據集,以訓練物理AI模型,縮小模擬與現實之間的差距。
模擬優先訓練:開發者可以在虛擬環境中訓練機器人,而不僅僅依賴現實世界的測試,這使過程更快且更具成本效益。
虛擬與現實的橋接:真實數據和合成數據的結合,加上基於模擬的訓練和測試,允許開發者將機器人在虛擬世界中學到的技能無縫轉移到現實世界中。
模擬機器人的未來
人形機器人正在提高製造、倉儲和物流、以及醫療等行業的效率、安全性和適應性,通過自動化複雜任務並提高人類工作者的安全條件。
包括波士頓動力公司(Boston Dynamics)和Figure在內的主要機器人公司已經開始採用並展示使用Isaac GR00T的成果。
Scaled Foundations正在降低各種機器人開發的門檻,從機器臂到人形機器人。該公司的 Open GRID Platform,與 NVIDIA Isaac Sim集成,為開發者提供了一種簡化的方式來通過易於使用的瀏覽器開發環境模擬機器人。
連接OpenUSD的世界
了解更多關於OpenUSD、人形機器人和最新AI進展的信息,請參加NVIDIA GTC,這是一個全球AI會議,將於3月17日至21日在加州聖荷西舉行。
不要錯過NVIDIA創始人兼CEO黃仁勳(Jensen Huang)在3月18日星期二的GTC主題演講——可以親自參加SAP中心或在線參加。他將分享推動AI、數位雙胞胎、雲技術和可持續計算下一波浪潮的最新技術。
首屆GTC人形開發者日將於3月18日星期三舉行。會後,加入實體AI開發者聚會,與NVIDIA GTC的開發者和研究人員交流。討論OpenUSD和生成AI驅動的模擬及數位雙胞胎的最新突破,以及針對下一個行業前沿的一般性機器人創新。
了解如何使用USD,並繼續優化3D工作流程,通過NVIDIA深度學習學院提供的免費新自學“學習OpenUSD”課程,專為3D開發者和從業者設計。欲了解更多OpenUSD資源,請探索OpenUSD聯盟論壇和AOUSD網站。
通過訂閱NVIDIA新聞、加入社區以及在Instagram、LinkedIn、Medium和X上關注NVIDIA Omniverse,保持最新資訊。
封面圖片由Fourier提供。
本文由 AI 台灣 運用 AI 技術編撰,內容僅供參考,請自行核實相關資訊。
歡迎加入我們的 AI TAIWAN 台灣人工智慧中心 FB 社團,
隨時掌握最新 AI 動態與實用資訊!








{kind=link}